HR Geyer
Wiesbaden, Germany
Teacher for Math, Physcis and Informatic in Gymnasium in Wiesbaden, Germany
Member of DUG (Derive User Group) since late 1980
Member of T3-Germany since 1997
Responsible for T3/TI-Content Portal


HR Geyer
Wiesbaden, Germany
Teacher for Math, Physcis and Informatic in Gymnasium in Wiesbaden, Germany
Member of DUG (Derive User Group) since late 1980
Member of T3-Germany since 1997
Responsible for T3/TI-Content Portal
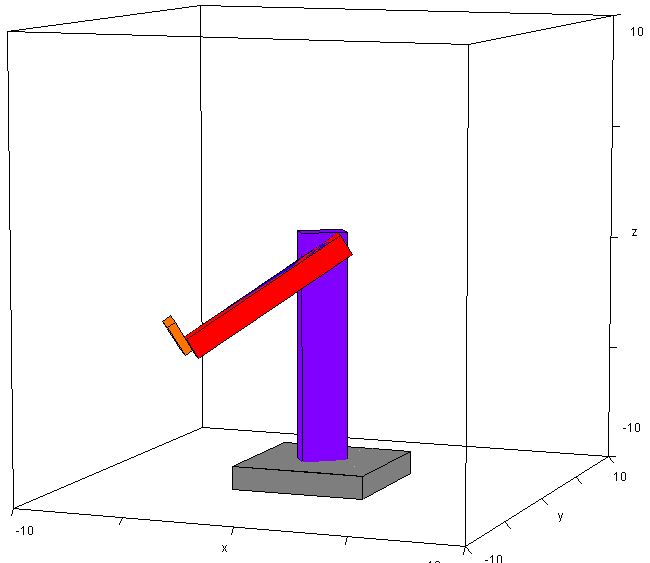
Aus Quadern wird ein "Roboter" mit Körper, Arm und Hand in der Flächendarstellung mit Derive6 aufgebaut. Die einzelnen Elemente sind unabhängig voneinander zu drehen und werden mit den Schi…
Auteur: HR Geyer
Onderwerp: Mathematics